Referência do wokwi-ky-040
Módulo Encoder Rotativo KY-040 com 20 pulsos por revolução.
Nome dos Pinos
| Nome | Descrição |
|---|---|
| CLK | Pino A do encoder rotativo (Pulso de clock) |
| DT | Pino B do encoder rotativo (Pulso de direção) |
| SW | Pino do botão de pressão. Normalmente aberto, em curto com GND quando pressionado |
| VCC | Alimentação positiva |
| GND | Terra |
Operação
O encoder rotativo oferece duas formas de interação:
- Rotação - Você pode girar o botão clicando nas setas. A seta superior gira um passo no sentido horário, e a seta inferior gira um passo no sentido anti-horário. Girando o botão irá produzir sinais digitais nos pinos DT e CLK, como explicado abaixo.
- Botão - Clique no botão para pressionar o botão. Enquanto pressionado, o botão conecta o pino SW ao pino GND.
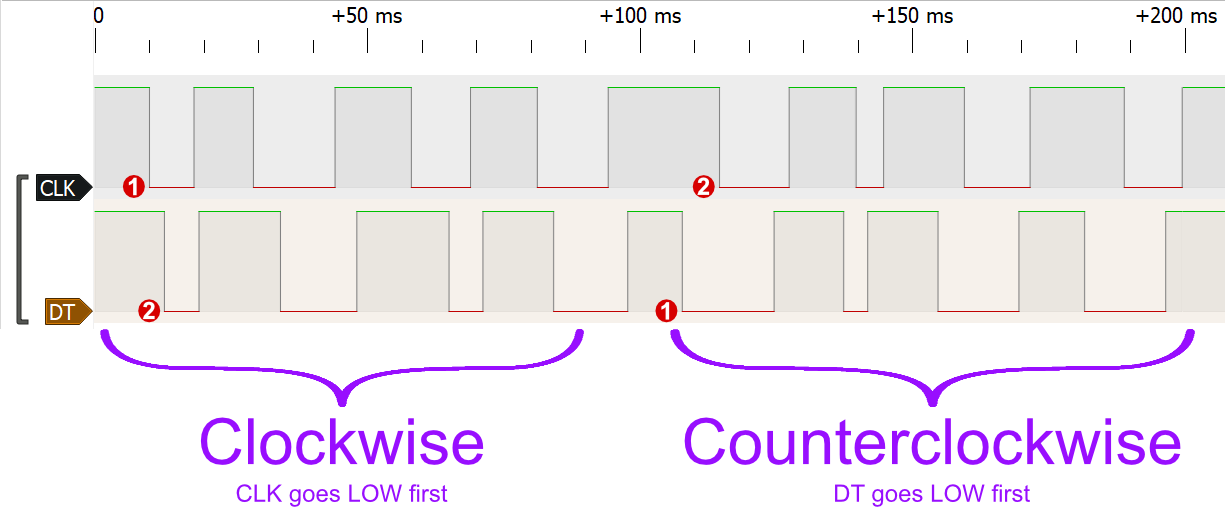
Cada vez que o usuário gira o botão, ele produz um sinal BAIXO nos pinos DT e CLK:
- Girar no sentido horário faz com que o pino CLK gere um sinal baixo primeiro e, em seguida, o pino DT vai para o nível baixo também.
- Girar no sentido anti-horário faz com que o pino DT gere um sinal baixo primeiro e então o pino CLK vai para nível baixo.
Ambos os pinos voltarão para o nível alto em alguns milissegundos. O diagrama a seguir ilustra isso:
Você pode fazer experimentos com os tempos dos pinos DT/CLK conectando-os ao Analisador Lógico Wokwi. Confira o Guia do Analisador Lógico para aprender como usar.
Esquemas
O módulo KY-040 inclui dois resistores internos de pull-up que colocam os pinos CLK e DT em VCC. A simulação sempre coloca esses pinos em nível alto, mesmo se você deixou o pino VCC flutuando.

Usando o Encoder Rotativo no Arduino
Lendo a rotação
Você pode ler a rotação verificando o status do pino CLK. Sempre que estiver BAIXO, leia o valor do pino DT para determinar a direção: HIGH significa rotação no sentido horário, LOW significa rotação anti-horária. Exemplo de código:
#define ENCODER_CLK 2
#define ENCODER_DT 3
void setup() {
Serial.begin(115200);
pinMode(ENCODER_CLK, INPUT);
pinMode(ENCODER_DT, INPUT);
}
int lastClk = HIGH;
void loop() {
int newClk = digitalRead(ENCODER_CLK);
if (newClk != lastClk) {
// Houve uma mudança no pino CLK
lastClk = newClk;
int dtValue = digitalRead(ENCODER_DT);
if (newClk == LOW && dtValue == HIGH) {
Serial.println("Girando no sentido horário ⏩");
}
if (newClk == LOW && dtValue == LOW) {
Serial.println("Girando no sentido anti-horário ⏪");
}
}
}
Você também pode executar este exemplo no Wokwi.
Nota: seu código precisará ler o estado dos pinos com frequência para detectar as rotações corretamente.
Se a sua rotina em loop() demorar muito tempo para ler o encoder (por exemplo: com o uso da função delay() em seu código), recomendamos usar attachInterrupt() para receber as alterações no pino CLK. Supondo que CLK esteja conectado ao pino 2 e DT ao pino 3 (como antes):
#define ENCODER_CLK 2
#define ENCODER_DT 3
void setup() {
pinMode(ENCODER_CLK, INPUT);
pinMode(ENCODER_DT, INPUT);
attachInterrupt(digitalPinToInterrupt(ENCODER_CLK), readEncoder, FALLING);
}
void readEncoder() {
int dtValue = digitalRead(ENCODER_DT);
if (dtValue == HIGH) {
Serial.println("Girando no sentido horário ⏩");
}
if (dtValue == LOW) {
Serial.println("Girando no sentido anti-horário ⏪");
}
}
void loop() {
// Faça o que for preciso
}
Usando o botão
Para ler o estado do botão do encoder, conecte-o a qualquer pino IO do Arduino e inicialize o pino como INPUT_PULLUP. Em seguida, leia o estado do botão usando digitalRead().
A leitura será BAIXA enquanto o botão for pressionado.
O exemplo de código a seguir acenderá o LED integrado do Arduino (13) enquanto o botão estiver pressionado. Ele assume que você conectou o SW ao pino 4 do Arduino. Você também precisa conectar o pino GND a um dos pinos GND do Arduino.
#define ENCODER_BTN 4
void setup() {
pinMode(ENCODER_BTN, INPUT_PULLUP);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
if (digitalRead(ENCODER_BTN) == LOW) {
digitalWrite(LED_BUILTIN, HIGH);
} else {
digitalWrite(LED_BUILTIN, LOW);
}
}
Controle pelo teclado
Para controlar o encoder com o teclado, clique nele primeiro, e em seguida, use as seguintes teclas:
| Tecla | Função |
|---|---|
| Direita / Cima | Gira um passo no sentido horário* |
| Esquerda / Baixo | Gira um passo no sentido anti-horário* |
| Barra de espaço | Pressiona o botão do encoder |
* Mantenha as teclas pressionadas para girar continuamente o encoder, gerando uma série de pulsos nos pinos CLK/DT.